
Rocket Motor Design Tool
The Rocket Motor Design Tool module of PRODAS are rocket motor interior ballistic codes written by Talley Defense which provide a transient, dynamic burn model for four (4) specific rocket motor grain geometries: Segmented, Star, Slotted, and Wagon Wheel
Surface geometry computations, along with thermochemical and gas dynamics equations allow computation of internal combustion pressure, thrust, impulse, mass flow, surface area and web as a function of time.
Combustion properties of standard rocket motor propellant grains are loaded from a PRODAS Reference Book, as shown below:
The effects of nozzle geometry, grain geometry, propellant burn rate, propellant thermochemical properties, igniter properties, and booster properties on rocket motor performance can be assessed.
Hand-off of rocket motor thrust vs. time to either 4 degree-of-freedom (DoF) or 6 DoF trajectory modules is automatic within the PRODAS environment, providing the user with an accurate, close coupled simulation ideal for assessing the performance of either ballistic or guided rocket systems, including dispersion.
Controlled Trajectory
Six Degree of Freedom Control Flight Simulation Program for Fin Control, Lateral Thrust, or Impulse Control
Use a 6DOF Trajectory Simulation to evaluate response to control inputs from fins, canards, and squibs. Control inputs are pre-programmed and applied during the trajectory.
Determine the efficiency and capability of a control method as implemented in your flight vehicle design. Perform this critical step in the development of a guided flight vehicle before moving on to a full guided vehicle simulation such as the Guidance Navigation and Control Simulation Module (AT 630).
The Six Degrees of Freedom (6DOF) Control Flight Simulation Program (CONTRAJ) evaluates flight performance, provides trade-offs, and design verification. Pre-programmed control phases are defined during the input phase of operation. CONTRAJ allows for two types of control concepts, (1) fin control, and (2) lateral thrust or impulse control. The flight dynamic equations of motion are developed relative to a body-fixed reference frame. Asymmetries in both mass and aerodynamics can be included.
CONTRAJ includes two 6DOF equations of motion models. The fixed plane model requires mass and aerodynamic symmetry with the exception of slight aerodynamic asymmetries such as trims or roll-induced effects. The body-fixed model allows both inertial and aerodynamic asymmetries such as an airplane configuration.
- 6DOF – Fixed Plane – non-rotating coordinate system
- 6DOF – Body Fixed – rotating coordinate system
CONTRAJ can be used to assess the control authority of guided projectiles with various flight control concepts or assess the angle of attack developed and flight path deviation of ballistic projectiles subjected to external disturbances (e.g. sabot discard)
Guidance Navigation and Control Prototype Tool
- Guidance, Navigation, and Control Prototype Tool Module combines both functions into a single drag-and-drop “Windows” style simulation
- A joint effort between Arrow Tech, Georgia Tech, and the Army Research Lab (ARL).
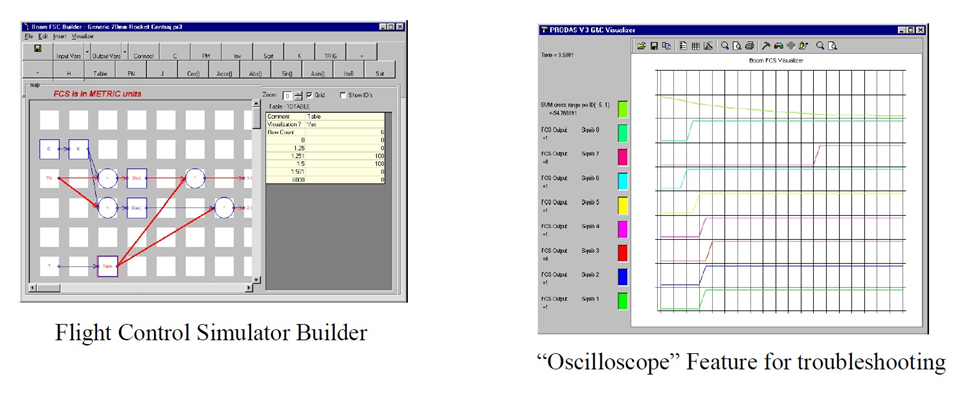
This unique module combines a guidance and control simulation with a body-fixed 6DOF trajectory simulation. A drag-and-drop editor is provided to quickly build a flight control system from common control system elements. Also provided is an “oscilloscope” feature to help design and troubleshoot the control system. This analysis module is a powerful development tool where trade studies can be completed quickly, getting your design ready for final modeling and analysis using the Guidance Navigation and Control Simulink Builder (AT-645/A).
A wide variety of control system building blocks are available including gain, sum, multi-ply, state-specific filters, polynomial filters, trigonometric functions, triggers, sample and hold, accelerometers, inertial to body transformations, single axis transformations, constants, table look-ups, etc. The user constructs a control system by appropriately arranging control system building blocks. The software properly couples all control system elements together. Any physical parameter of the projectile model can be dynamically controlled. With this arrangement, virtually any projectile or missile flight control system can be modeled in detail.
Guidance Navigation and Control SIMULINK Builder
PRODAS is known for its seamless integration of analysis and simulation software tools from various disciplines in a graphical environment with a simple user interface. Now PRODAS has taken a dramatic leap forward by integrating with MATLAB® and Simulink®. The MATLAB® world is massive with general-purpose programming and scientific computation and toolbox and block set extensions for specific applications. With the integration of this powerful capability into PRODAS, a new paradigm of rapid and reliable system simulation for smart munitions is made possible.
MATLAB/Simulink Trajectory Module Features;
- Modeling in Simulink®
- System Simulation
- PRODAS Integration
- Concept to Production
Modeling in Simulink®
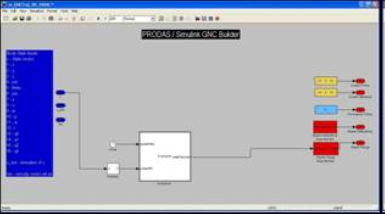
PRODAS Blockset – Leverage the highly validated PRODAS 6+DOF trajectory block as the starting point for your simulation.
Use lower-level blocks to build your own trajectory modules such as aerodynamics, mass properties, rocket motor, squibs, and more. Customize any PRODAS block to meet your specific modeling needs.
100% Compatibility with All Simulink® Blocksets – Use any of your licensed Math Works products to build your simulation. The integration with PRODAS does not place any restrictions on what you can do with MATLAB® and Simulink®.
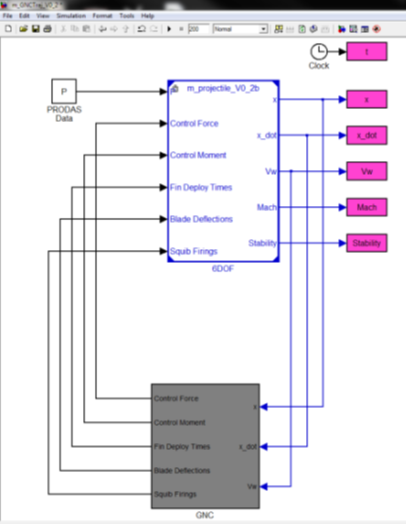
Design Your Guidance, Navigation, and Control (GNC)
System – Use the PRODAS block set, the Aerospace block set, and your own custom blocks to design the GNC system. The default template provides an empty GNC subsystem with all the connections to the 6+DOF to enable closed-loop control.
For More Details CLICK HERE
